輕量化TCP/IP(lwIP)堆疊是TCP/IP協定的精簡實作,專門設計用來縮減RAM記憶體的使用量,這使其非常適合用在嵌入式系統。它提供三種獨特的應用程式介面(API):
‧ 未封裝的低階API
‧ 負責網路通訊的高階 API
‧ BSD 風格的socket通訊端 API
本文專注探討使用未封裝API介面的範例。運用未封裝API建置callback回呼函數的應用程式會由核心事件觸發。
儘管未封裝API較socket通訊端API更為複雜,但由於其處理負荷(overhead)較低,因此能提供高出許多的吞吐量。
接著將探討幾個建構在lwIP TCP/IP堆疊之上的範例,其中採用Analog Devices的MAX32570微控制器。開始的部分是一個ping展示,主要從PC向裝置發送ping探測訊號。後續的部分介紹TCP Echo伺服器範例,這個初步的伺服器展示對於測試TCP連結相當實用。
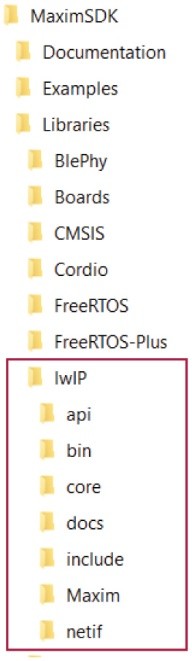
ADI的MaximSDK軟體開發套件收錄許多必要的軟體與工具,讓用戶針對ADI的MSX32xxx微控制器開發韌體。套件中有一個lwIP堆疊函式庫檔案「MaximSDK\Libraries\lwIP」。圖一顯示MaximSDK資料夾結構中的lwIP函式庫檔案。
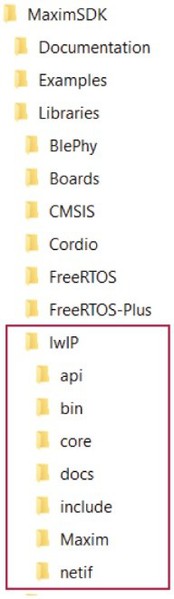
| 圖一 : ADI的MaximSDK lwIP 函式庫檔案 |
|
lwIP資料夾包含多個子目錄:
‧ API 資料夾(網路通訊與 socket 通訊端API)
‧ 核心資料夾(lwIP 核心檔案,包含 “tcp.c”、“ip.c” 等)
‧ Netif 資料夾(網路介面檔案)
‧ Include 資料夾(所有lwIP include 引入檔案)
‧ Maxim資料夾(為ADI微控制器設計的客製化mac 驅動程式)
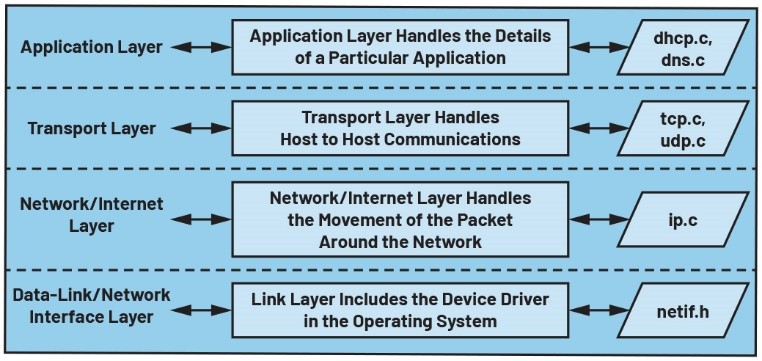
lwIP架構依循TCP/IP模型結構。TCP/IP通訊協定是多個分層組成的協定。TCP/IP通常被看成是一個四層結構的系統,如圖二所示。
lwIP 專案檔中一定有一個名為「lwipopts.h」的組態檔案,以及一個名為「opt.h」的組態檔案。「opt.h」檔案中記錄所有預設的堆疊組態以及其模組組態,而「lwipopts.h」則讓使用者能自行設定堆疊與其模組的所有組態。須注意這個檔案並未包含所有可能的lwIP選項。因此,如果在“lwipopts.h”組態檔案中沒有定義某項組態,系統就會採用「opt.h」中定義的預設組態。
類似的情況,lwIP函式庫有一個和程式相關的表頭檔案名為 「lwipcfg.h」。包括控制器的IP位址、閘道器位址、網路遮罩位址、以及MAC位址都應定義在「lwipcfg.h」檔案。
要在lwIP以及底層的硬體驅動程式之間建立連結,需要用到一個特定平台專屬的配接層。舉例來說,在為微控制器建置lwIP堆疊時,需要量身設計的驅動程式來橋接lwIP堆疊與微控制器的乙太網路MAC驅動程式。這個客製化驅動程式應涵蓋以下功能:
‧ 初始化功能: 此項功能負責初始化微控制器專屬的MAC驅動程式
‧ 傳送功能: 將從TCP堆疊收到的資料傳送給乙太網路MAC驅動程式,以便進行後續的傳輸
‧ 接收功能: 將從乙太網路MAC驅動程式收到的封包轉送到TCP堆疊
對於ADI微控制器,預存的客製化驅動程式已放在「MaximSDK\Libraries\lwIP\Maxim\mxc_eth.c」路徑下的MaximSDK。這個驅動程式可作為包裝器,能包裝微控制器本身的Ethernet MAC (EMAC)週邊函式庫,該函式庫位於「C:\MaximSDK\ Libraries\PeriphDrivers\Source\EMAC」路徑下的週邊驅動程式中。
Ping 範例
「ping」指令是一個簡單的工具,用來進行網路除錯。其能執行網際網路控制訊息協定(ICMP)的echo 回應請求,向指定的IP位址傳送一個訊號然後等候回覆。當目的地收到這個請求,就會回覆一個echo封包。本章節解釋如何從Windows PC向微控制器執行基本的ping測試以檢查其連結狀態,同時還會闡述如何使用微控制器的ping模組來和PC進行通訊。
以下詳列Windows環境中ping工具的工作流程:
‧ 向微控制器傳送4個資料封包,然後等待回應
‧ 微控制器將這些資料封包傳回PC作為回應,亦即迴響答覆請求。
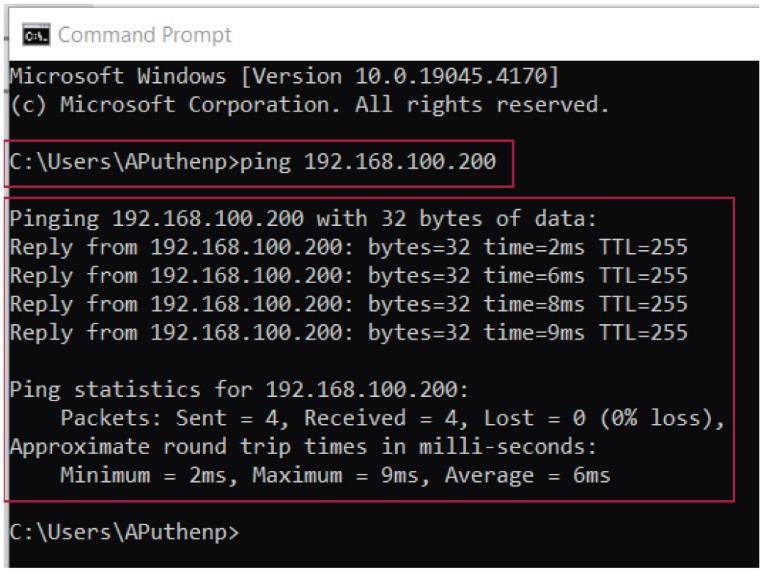
‧ 執行ping測試
‧ 使用乙太網路線將微控制器EVKIT套件連到PC
‧ 開啟命令列提示視窗,然後輸入「ping <微控制器的IP位址>」然後按下enter鍵
命令列提示視窗中顯示回應,如圖三所示,意謂著在PC與微控制器之間已建立正常運行的連結
從微控制器測試Ping
「lwIP_Ping」檔案是ADI旗下MAX32570微控制器的ping範例,收錄於MaximSDK開發套件。該檔案存放在「C:\MaximSDK\Examples\ MAX32570\lwIP_Ping」,目錄中並提供以下指南:
‧ 微控制器的IP位址是使用「lwipcfg.h」檔案來設定。微控制器與PC的IP位址應在同一個網段。在微控制器的「lwipcfg.h」檔案中,PC的IP位址應設定成閘道器位址。
‧ 使用乙太網路線連接PC與MAX32570 EVKIT套件
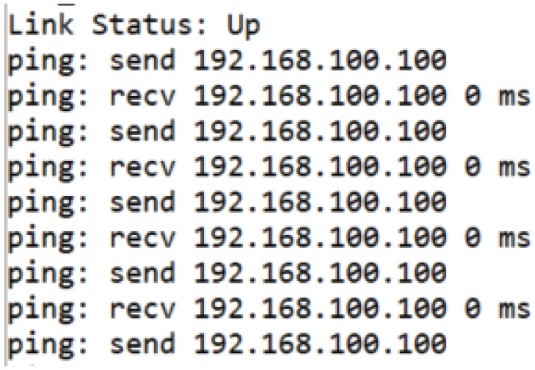
‧ 執行ping範例碼
‧ 在eclipse程式中開啟序列終端機 (Window-> Show view -> Terminal)。如圖四所示,如果ping成功,終端機畫面應顯示ping的結果
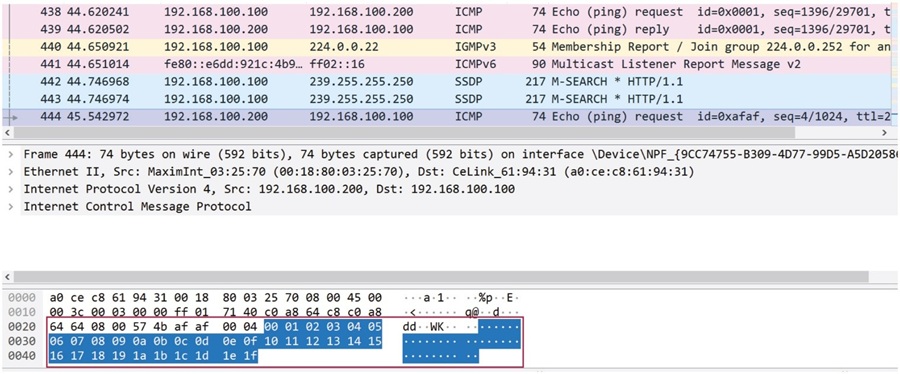
命令列提示視窗僅顯示ping統計資料。要檢視實際傳送的資料,需要用到一個名為Wireshark的程式。Wireshark能擷取網路連線所傳送的資料。開啟Wireshark後,再選擇乙太網路選項。另外還能顯示像是來源與目的地MAC位址、來源與目的地IP位址、通訊協定、以及額外傳送資料等細部資料。Wireshark顯示的資訊如圖五所示。
正如範例所示,傳送的資料為 0x00, 0x01… 一直到0x1F。但如果使用者想要修改傳送資料的內容那該怎麼做?
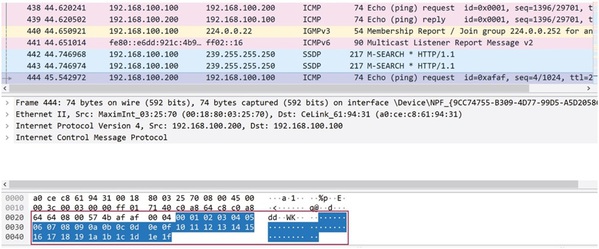
| 圖五 : Wireshark程式中顯示的ping資料封包 |
|
修改微控制器Ping指令所發送的資料
透過ping指令發出的資料是在「ping. c」檔案中設定的。「Ping.c」檔案是ping的傳送程式模組。要傳送的資料大小是以「PING_DATA_SIZE」參數設定在“ping.c”檔案中。例如要傳送的資料大小為32 位元組。
準備要傳送的資料的定義亦寫在「ping.c」檔案。額外的資料緩衝區會寫入相同的資料,如「0x00, 0x01, 0x02…to 0x1F.」。
依據應用程式的需求,如果使用者想要修改資料,可以在「ping .c」檔案中修改資料緩衝區。舉例來說,將所有32位元組的資料變更成「0x01, 0x01…0x01」。在Wireshark中顯示修改後的「ping .c」檔案。此處使用新的參數來更新資料。
TCP Echo 伺服器
ping範例中採用ICMP來判斷目標系統的反應狀況。其會使用預設資料透過網路向目標接收端傳送一個echo請求。當目標位址收到這個請求時,它會回覆一個echo應答封包。
如果使用者希望從某個裝置向另一個裝置傳送客製化資料,可使用TCP協定進行資料傳輸。在標準TCP函式中的Echo服務主要用來檢查可及性以及判斷各種路由問題。在這項服務中,伺服器與客戶端都是使用TCP來建立的。當伺服器從客戶端收到訊息,它會回覆相同的訊息。
在MaximSDK,「lwIP TCP」原始碼檔案展示如何使用lwIP函式庫中的 TCP函數。在這個案例中,微控制器扮演TCP伺服器,並會等候客戶端發送連接請求。接著伺服器會返傳從客戶端送來的資料。在TCP Echo伺服器範例中,應使用「tcpecho_raw.c」原始碼檔案。依循以下步驟設定TCP Echo伺服器。
要設定TCP Echo伺服器:
‧ 建立一個 socket
‧ 將socket綁定到宣告的埠號
‧ 完成綁定後,其會開始監聽傳來的連接請求
‧ 收到連接請求後,其會接受客戶端設備發送來的連接請求
‧ 伺服器接收到客戶端傳來的資料
‧ 最後,其傳回相同的資料
圖六的指令碼顯示了韌體的結構,該結構是主函數的一部分。config_emac會初始化EMAC,而MXC_ETH_Init 則會初始化 lwIP堆疊。
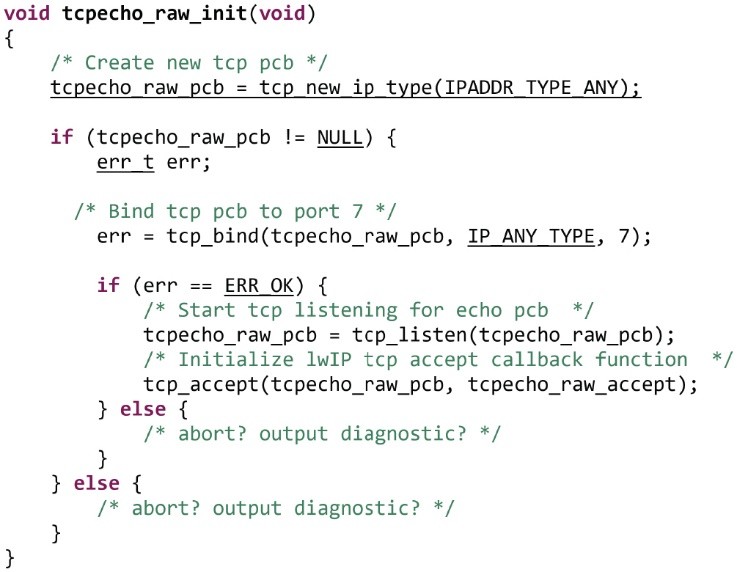
在EMAC與lwIP堆疊完成初始化後,TCP Echo 伺服器會透過tcpecho_raw_init進行初始化。Echo伺服器結構如圖七所示。
Echo伺服器的初始化會建立新的socket。之後它會將指定的IP位址和埠號綁定到新的socket。完成綁定後,其會持續監聽遠端客戶端發送的連接請求。
要測試TCP伺服器範例,須使用 echotool.exe PC 客戶端工具。echotool.exe執行檔應存放在C槽,故我們應從C槽開啟命令列提示視窗。在客戶端模式中,其會將資料傳送到伺服器並檢查是否會回傳。確保一定要在客戶端模式中使用echo工具來測試伺服器範例。
如何測試 TCP Server 範例
‧ 確保所有連結都正常運行
‧ 使用eclipse軟體將範例程式碼組建成可執行程式
‧ 在除錯模式中執行指令碼
‧ 在遠端PC開啟命令列提示視窗。
‧ 在命令列提示欄中輸入以下指令:
「C:\>echotool IP_address /p tcp /r 7 /n 15 /t 2 /d LwIP TCP echo server Example」
IP_address 是實際的機板IP 位址。靜態 IP 位址為192.168.100.200
/p tcp 是通訊協定 (TCP協定)
/r 是迴應伺服器的實際遠端通訊埠 (echo port)
/n 是echo請求的數量
/t 是連接時長限制的秒數
/d 是請求回應的訊息 (像是 「LwIP TCP echo server Example」)
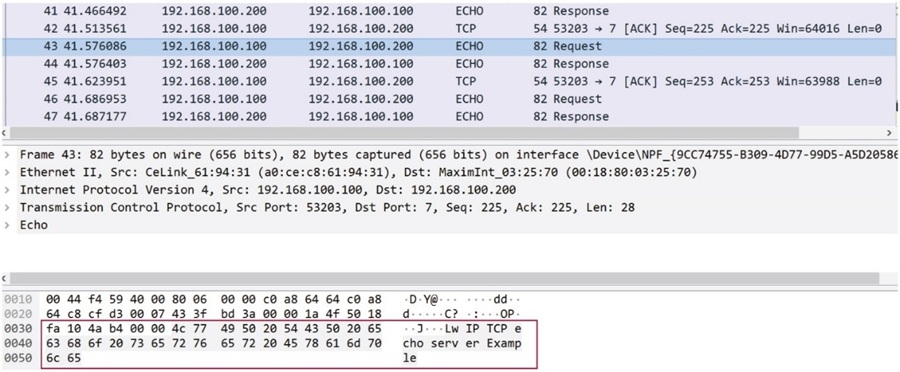
TCP協定和透過網路傳送的資料,都可透過Wireshark軟體進行檢驗。透過網路傳送的封包在會Wireshark中顯示,如圖九所示。透過命令列提示欄傳送的資料為「LwIP TCP echo server Example」。在Wireshark程式中也能看到相同的資料。
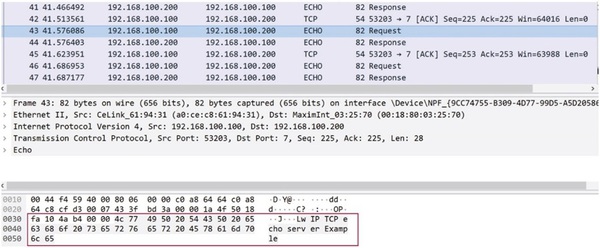
| 圖九 : Wireshark 程式中的TCP Echo 伺服器輸出結果 |
|
總結
瞭解並有效率地運用lwIP堆疊的功能以及ICMP協議為基礎的ping工具和TCP協定,能為網路診斷以及資料傳輸開創出眾多的可能性。ADI的MAX32570微控制器與MaximSDK 提供一個紮實的基礎來建置lwIP堆疊,並建構可靠的通訊系統。藉由依循本文列舉的範例,即可排除各種網路問題,進而創造無縫的連結以及確保資料完整性。
(本文作者Anju Puthenpurayil為ADI應用工程師)