每两年举办一次的国际机器人展iREX (International Robot Exhibition)今年已经进入第21届,随着机器人相关技术不断进步,机器人的发展也越来越多元化,而今年的展会也是历年来规模最大的一次。其中,除了主要重点的工业机器以外,其他领域的机器人数量也不断的在增加,例如医疗保健、辅助型或救灾机器人。
 |
| /news/2015/12/07/1817288030S.jpg |
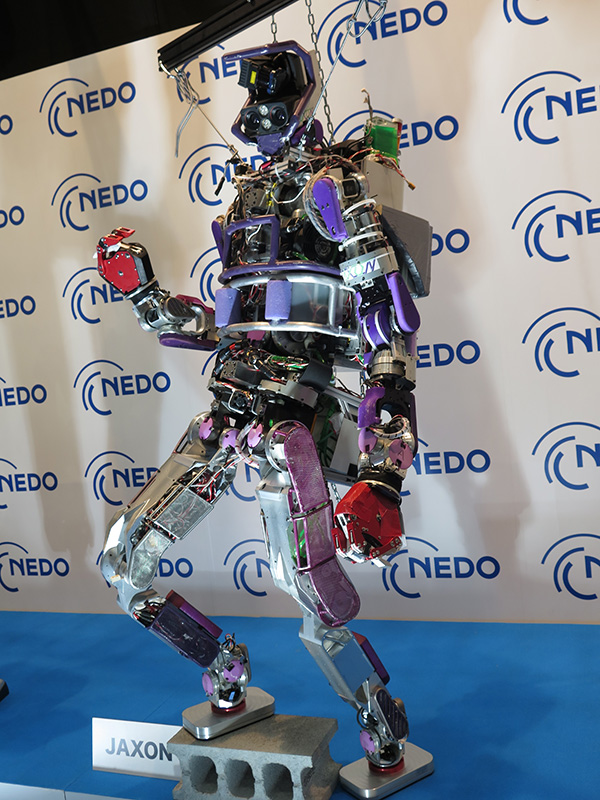
其中,在救灾型机器人的部分,由日本新能源及产业技术总合开发机构(New Energy and Industrial Technology Development Organization, NEDO)所提出来的三款人形救灾机器人HRP-2 Kai、Hydra和Jaxon备受关注。这两款机器人是在2011年日本大地震后所开发的救灾型机器人,可以在恶劣或对人体有害的环境下工作,这对于受到地震及火山爆发威胁的日本而言,极其重要。不过不同于大家所想像机器人能飞檐走壁,这两个机器人属于动作缓慢但却稳定的类型。
在展场中,NEDO也设置模拟灾害现场,让机器人实际展示其救援行动,而两款机器人能够直接的任务包括在崎岖地面走路、爬行甚至是开门。 NEDO机器人部门经理Satoshi Kochiyama表示,我们认为类人型机器人对于开门、上楼这一类型的任务最能够发挥。
其中,HRP-2 Kai有170公分高,可以走在狭窄的木板上,目前已经能辨识一些残骸碎片,头部装置的感测器则让他知道该把脚踩在哪里。 Hydra是由东京大学中村实验室和大阪大学、千叶工业大学、神户大学以及NEDO共同研发出来的机器人,透过油压来驱动,其身高180公分,全身总共有41个可以移动的关节,包含两只手臂各有8个、两条腿各有6个、两只手各有5个、腰部两个以及颈部1个。
而Jaxon跟高188公分,可以判断天花板的高度,弯腰走路,并且把路径上的障碍物搬开。 NEDO机器人业务部负责人Shuji Yumitori表示,目前人形机器人还不够完善,对于崎岖地形上的平衡问题仍还在克服当中,他们也希望能进一步改善种种的问题,并希望在五年内能将两款机器人商用化。