本文敘述先進汽車控制演算法的處理器迴圈(processor-in-the-loop;PIL)模擬開發原型系統;說明如何以模型為基礎的設計流程建立控制演算法的模型,並且對其進行評估,接著部署至混合動力車輛開發平台。
當轉為透過運算能力來定義的車輛功能愈來愈多,工程師為能源管理、電池管理和動力傳動控制所設計的演算法也變得更加複雜。這使得能夠即時執行運算量密集演算法的車用處理器的需求增加。
為了展示NXP處理器的能力,我們的團隊為了先進汽車控制演算法的處理器迴圈(processor-in-the-loop;PIL)模擬開發了一個原型系統。我們使用Simulink,以模型為基礎的設計流程建立控制演算法的模型,並且對其進行評估,接著部署至NXP S32S GreenBox II混合動力車輛開發平台(圖1)。
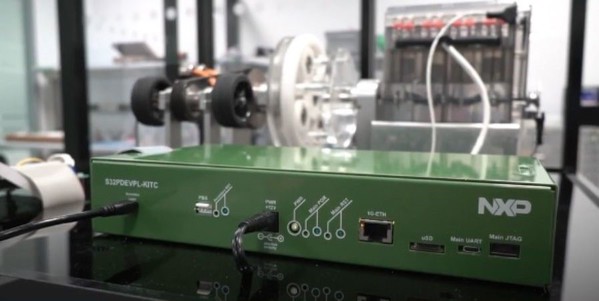
| 圖1 : S32S GreenBox II混合動力車輛開發平台。 |
|
我們從內含混合動力車輛(hybrid electric vehicle;HEV)受控體模型和經過優化的監督控制器(supervisory controller)參考應用開始。這使得NXP展示系統開發的時間縮短了超過九個月。
HEV與控制器建模
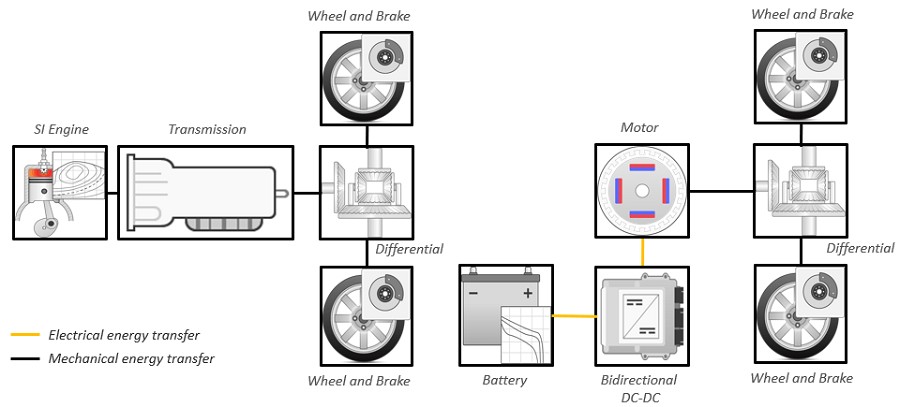
我們的工程師在半導體領域相當專業,但是對於車輛建模與先進能源管理控制策略的直接經驗就比較有限。為了節省建立完整、系統層級、又與客戶使用的模型相似的HEV模型的時間,使用了Powertrain Blockset中的HEV P4參考應用。這個P4參考應用包含一個完整且預先建立的HEV模型,其中有一個火星點燃引擎、傳動、鋰離子電池、以及電動馬達(圖2)。
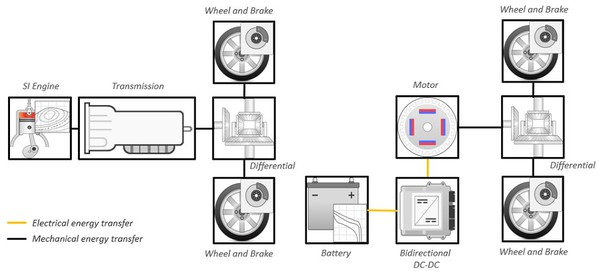
| 圖2 : 透過Powertrain Blockset元件建立的HEV P4動力傳動模型。 |
|
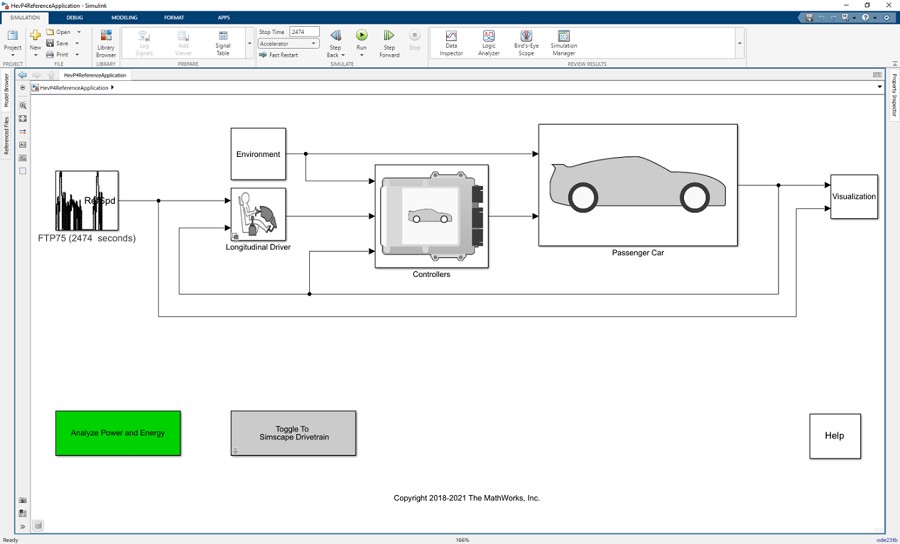
除了HEV模型之外,參考應用也包含了引擎、傳動與P4混合控制模組,還有其他能夠執行全面性封閉迴圈模擬的元件(圖3)。以Drive Cycle Source and Longitudinal Driver模組為例,它會產生一個標準的縱向駕駛週期,並且將速度(velocities)轉換為正規化的加速度與制動指令。
從車輛速度、引擎速度、電池充電狀態和燃料經濟性(以MPGe為單位)的子系統圖表,讓我們能夠將車輛層級的表現與隨著模擬的駕駛週期的能源使用視覺化呈現。
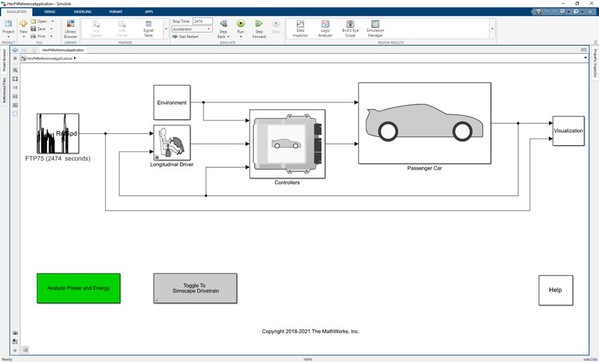
| 圖3 : 封閉迴圈HEV P4模型,包含控制器、車輛、駕駛週期、以及視覺化呈現的子系統。 |
|
於GreenBox II執行PIL模擬
在執行PIL模擬之前,先經過一次模型迴圈(model-in-the-loop)模擬,幫助熟悉含在參考應用內的HEV模型與等效油耗最佳化策略(Equivalent Consumption Minimization Strategy;ECMS)演算法。這個由史丹佛的Dr. Simona Onori開發的監督能源管理演算法能夠找出從引擎或電動馬達的最適化平衡來提供車輛動力。
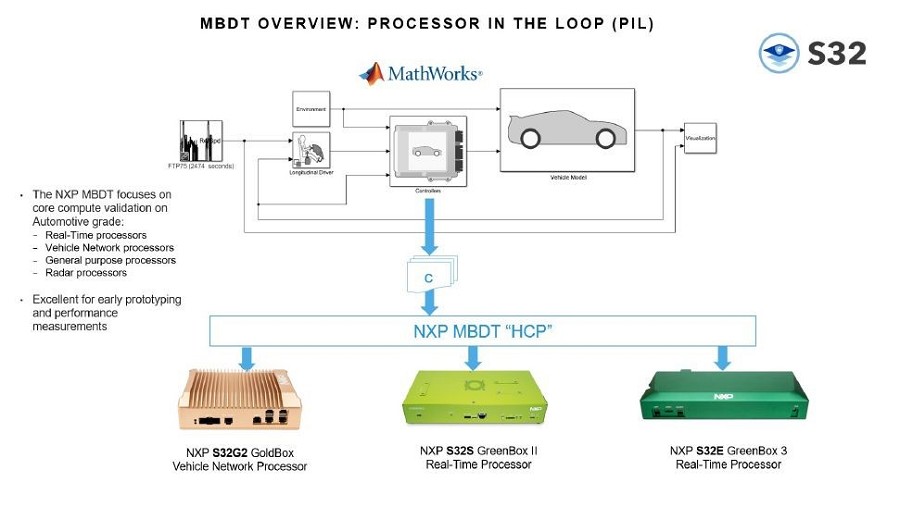
為了要在GreenBox II執行ECMS演算法,我們使用Embedded Coder從控制模型產生程式碼,並且使用NXP Model-Based Design Toolbox(MBDT)硬體支援套件來部署。MBDT包含了初始化的例行程序以及裝置驅動器,讓複雜的演算法可以容易地部署且執行於NXP處理器(圖4)。
使用這樣的設置來執行PIL模擬,其中加速和制動指令會由Simulink傳送到在GreenBox II上執行ECMS演算法的控制器。這個控制器產生引擎與電動馬達力矩指令訊號,這些訊號會被傳送到HEV受控體模型。引擎速度和馬達速度等來自於受控體的訊號再回授給控制器。在PIL模擬過程,會在這些訊號和其他的主要衡量指標更新於Simulink時監測它們(圖5)。
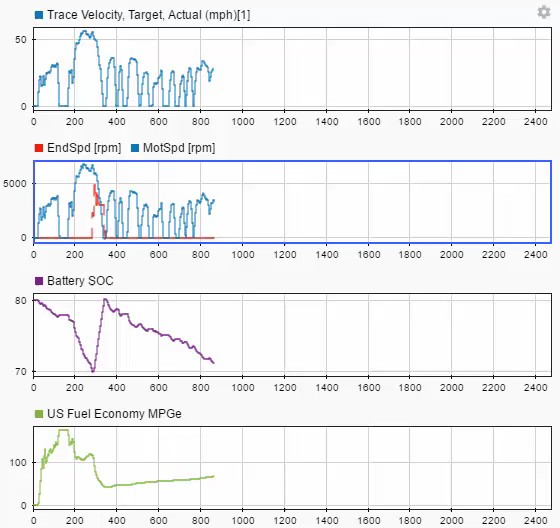
| 圖5 : 某一段運作時間內的速度、引擎和馬達速度、電池充電狀態、燃料經濟性的圖表。 |
|
設置的延伸與改善
在GreenBox II平台執行首次的ECMS演算法PIL模擬之後,我們完成了幾項設計迭代。舉例來說,Vehicle Dynamics Blockset的轉向與懸吊系統被整併到原始模型,可以用即時的加速、制動、轉向控制來取代預先定義的駕駛週期。並且加入了會在加速和制動時啟動的微型車輪和電動馬達;同時將一個以Unreal Engine為基礎的3D模擬環境納入Vehicle Dynamics Blockset(圖6)。
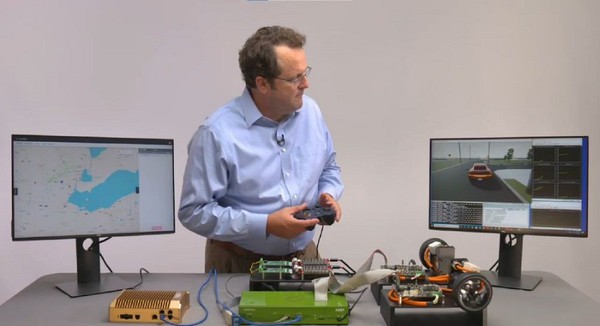
| 圖6 : 作者正在控制一個PIL模擬,同時查看車輛的3D視覺化結果。 |
|
更近期的設置版本包含透過NXP GoldBox service-oriented gateway來整合Amazon Web Services(AWS),這可以管理車輛資料到AWS cloud data stores的流程來進行分析和報告。
未來的應用將利用S32Z和S32E即時處理器。NXP GreenBox 3即時研發平台融合了S32E,內含更強大的數學運算執行能力,因此可支援更先進、運算更密集的應用。
(本文由鈦思科技提供;作者Curt Hillier任職於恩智浦半導體)