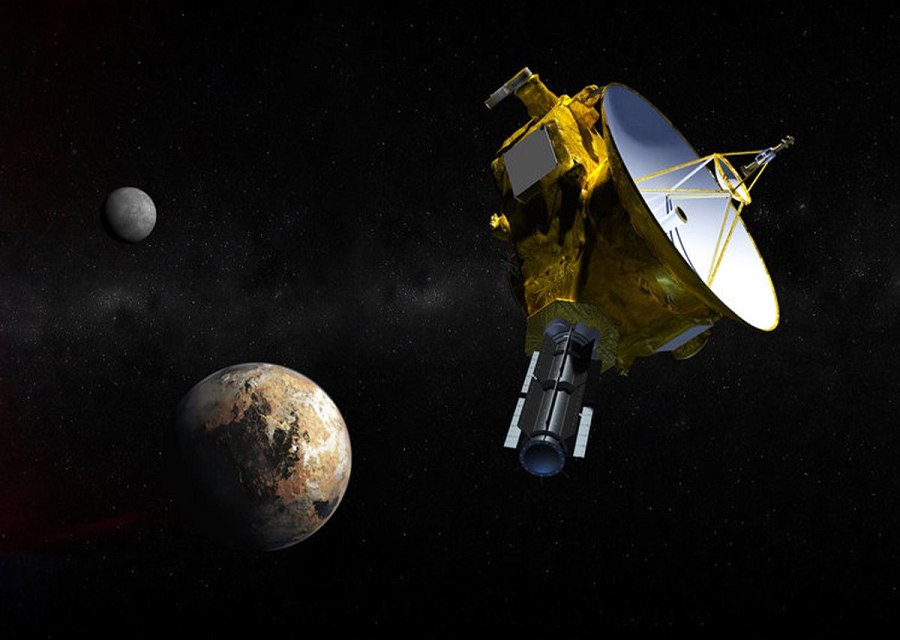
2015年7月,美國國家航空暨太空總署(NASA)的新視野號(New Horizons)太空飛行器飛越冥王星,向全世界提供了這個矮行星與其衛星的壯觀圖片(圖一)。新視野號還延續它的任務,在2019年飛越了小行星486958(Arrokoth)時,將探索範圍拓展至古柏帶(Kuiper Belt)傳回太空飛行器探索過最遙遠距離的的天體圖片。
同一時間,第二艘太空飛行器是NASA的歐西里斯號(OSIRIS-REx),在2016年發射,目的是要從小行星貝努(Bennu)的表面採集樣本。於2020採集到樣本之後,會在2023年將樣本帶回地球。這段期間,NASA還在2021年發射了露西號(Lucy),它將成為第一艘造訪木星的小行星Trojan的太空飛行器。
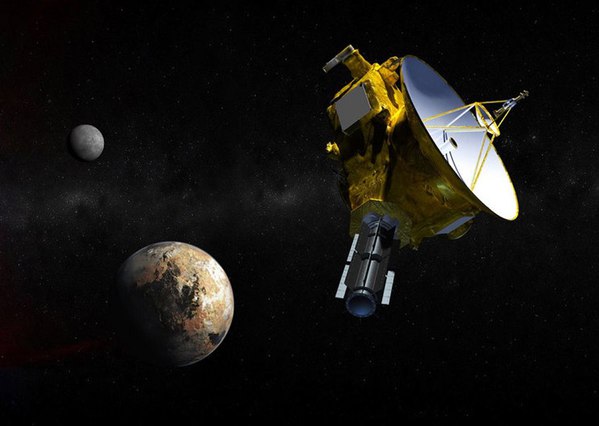
| 圖一 : 新視野號太空飛行器飛越冥王星和衛星Charon的展示圖 |
|
這些並行的NASA任務都背負著一個共同目標:為科學家提供需要的資料,以助於更深入了解我們的太陽系,包含太陽系的形態以及其中的天體。這三項任務還有其他的共通點—就是它們都使用了由KinetX Aerospace的團隊建立的光學導航(optical navigation;OpNav)軟體。
...
...
| 使用者別 |
新聞閱讀限制 |
文章閱讀限制 |
出版品優惠 |
| 一般使用者 |
10則/每30天 |
0則/每30天 |
付費下載 |
| VIP會員 |
無限制 |
25則/每30天 |
付費下載 |