本文主要剖析工業自動化領域中,馬達控制位置感測介面研發業者所面臨的各種常見問題 – 亦即能夠在速度更快、且體積更小的應用中感測位置。從編碼器擷取資訊藉以精準量測馬達位置,攸關著自動化以及機器人設備能否成功運作。而高速與高解析度的對偶式同步採樣類比至數位轉換器(ADC)則是這類系統的重要元件。
馬達的旋轉資訊,像是位置、速度、以及方位等,都必須維持精準,才能針對各種新興應用製造精準的驅動器與控制器-如挑揀機(pick-and-place)負責將微小元件置放在極有限的電路板空間內。
近年來馬達控制的元件持續微縮,藉以支援包括醫療機器人以及航空與國防領域的無人機。此外,微小的馬達控制器還能促成工業與商業領域的各種新應用。研發業者面臨的挑戰,是在高速應用中因應位置回饋感測器的高精準度要求,同時還必須將所有元件置入到有限的電路板空間,然後裝入到像機器人手臂等機具。
馬達控制
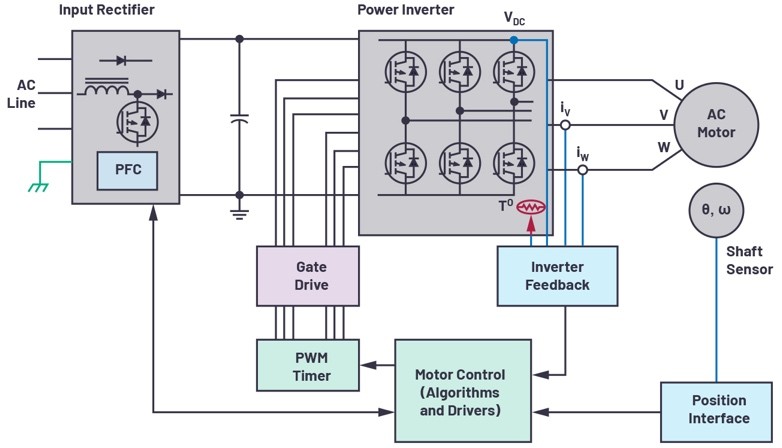
如圖1所示的馬達控制迴路,主要由馬達、控制器、以及位置回饋介面構成。馬達帶動旋轉軸轉動,進而使機器臂作動。馬達控制器告訴馬達何時施力、停止、或持續旋轉。迴路中的位置介面則會向控制器提供旋轉速度以及位置資訊。這方面的資料攸關著挑揀機能否將微小組件置放到極小的電路板空間。上述這些應用都需要掌握旋轉物體的精準位置量測資訊。
位置感測器的解析度必須高到足以精準地偵測到馬達轉軸的位置、正確取起微小元件、然後精準地放到電路板上。 此外,更高的馬達轉速也會產生更高的迴路頻寬以及更低延遲的要求。
位置回饋系統
在較低階的應用中,增值式感測器搭配比較器的組合就足以執行位置感測,而較高階的應用就需要較複雜的訊號鏈。這些回饋系統包含位置感測器、類比前端訊號調節、ADC、以及驅動器,然後將資料轉成數位格式。
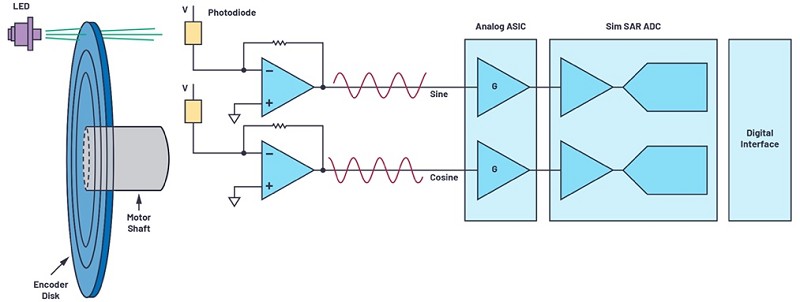
其中一種較精準的位置感測器是光學編碼器,其內部包含一個LED光源、裝在馬達轉軸上的標記盤、以及光感測器。標記盤上有不透明的標記圖樣以及透明區域,用來阻隔光線或讓光線通過。接著再由光感測器偵測光線,並將on/off光訊號轉換成電氣訊號。
當標記盤旋轉時,光感測器 – 連同標記盤上的圖樣 – 產生正弦與餘弦訊號,記錄成mV 或μV 等級的電壓波動。這類系統通常為絕對位置光學編碼器。這些訊號會饋送到類比訊號調節電路,通常包含一個分立放大器或一個類比PGA,將訊號增益放大到1 V p-p 範圍—通常能納入到 ADC 輸入電壓範圍以達到最大的動態範圍。每個放大後的正弦與餘弦訊號都會被同步取樣ADC的驅動放大器擷取到。
ADC必須在其通道中同時取樣,如此一來,正弦與餘弦資料點才會在完全相同的時間點擷取,兩個資料才能拼湊出轉軸的位置資訊。ADC轉換的結果會送到ASIC或微控制器。馬達控制器每個PWM週期就會查詢編碼器位置,然後用這個資料並根據收到指令來驅動馬達。在以往,系統設計者必須權衡ADC速度或通道數,以便讓元件能塞入到有限的電路板中。
優化位置回饋
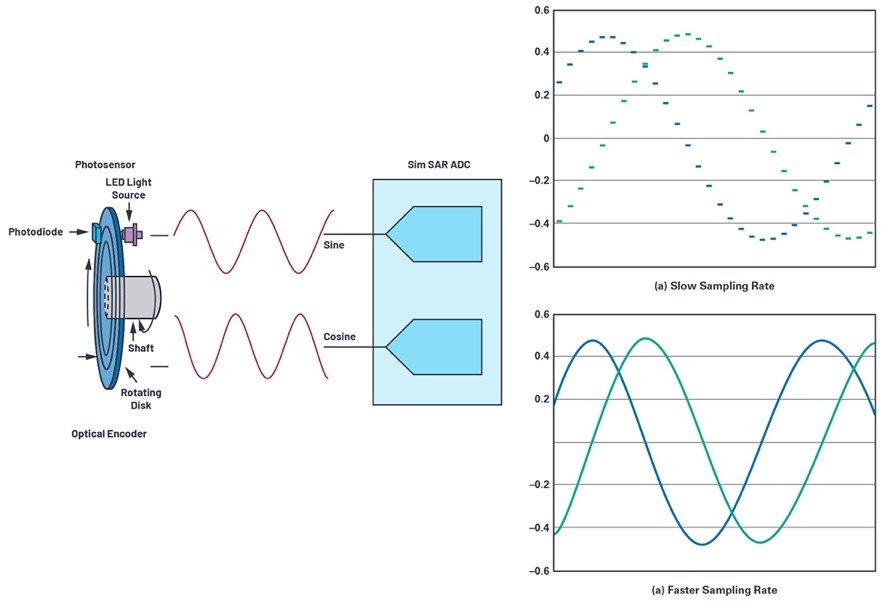
持續演化的技術需求,促成馬達控制應用的創新,進而要求高精準的位置偵測機制。光學編碼器的解析度取決於標記盤上微型蝕刻的時槽數量,通常為數百或數千之譜。以內插法將這些正弦正餘弦訊號置入到高速、高效能ADC,就讓我們能製造出更高解析度的編碼器,而不必對編碼器的標記盤進行系統變更。舉例來說,以較慢速度對編碼器的正弦與餘弦訊號進行取樣,就會擷取到較少的訊號值,如圖3所示 ,這種作法也會限制擷取位置的精準度。
在圖3中,當ADC以較高速度取樣,就會擷取到較密集的訊號值,以及判斷出更精準的位置。ADC的高速取樣率能允許系統執行過取樣,進而改善雜訊性能,以及消弭一些數位後處理的需求。
另外,這種作法也會降低ADC的輸出資料率,產生較慢的序列頻率訊號,數位介面也能簡化。馬達位置回饋系統置於馬達組件上,在某些應用中其體積相當微小。尺寸則是至關重要,其決定了編碼器模組是否能裝入到有限的電路板空間。新型的多通道元件由於裝配在單一微小的封裝內,因此適合用在需要節省空間的應用。
光學編碼器位置回饋設計範例
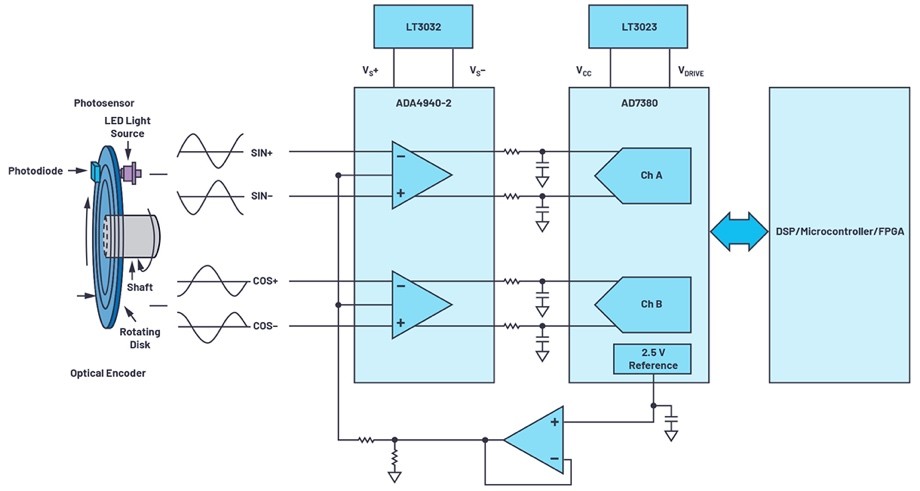
圖4顯示一個光學編碼器位置回饋系統的最佳化解決方案範例。這個電路能輕易連結到絕對式光學編碼器,其中的電路可以輕易擷取到編碼器內的差動正弦與餘弦訊號。
ADA4940-2 前端編碼器是一種雙通道、低雜訊、完全差動式放大器,負責驅動AD7380這個雙通道、16位元、完全差動式、4 MSPS、同步取樣 SAR ADC,而這個轉換器裝在底面積僅 3 mm × 3 mm 的LFCSP 封裝中,晶片內部2.5V參考電壓使得這個電路的元件要求減至最小。
ADC 的VCC 與VDRIVE電壓,還有放大器驅動器的供電線路,都可用LDO穩壓器負責供電,像是LT3023 和LT3032這類元件。這些參考設計連到介面 – 例如運用一個1024時槽的光學編碼器,能在編碼器轉盤轉一圈的時間內產生1024個週期的正弦與餘弦訊號—16位元AD7380對每個編碼器時槽取樣,紀錄下216
種編碼值,整體編碼器解析度提高到26位元。高達4 MSPS的吞吐率確保能擷取到清晰的正弦與餘弦週期訊號,擷取到的編碼器位置也是最及時的資料。
此外,高吞吐率讓過取樣程序在晶片內直接完成,省下數位ASIC或微控制器將精準編碼器位置饋送到馬達所耗費的時間。AD7380在晶片內完成過取樣另外一項好處,是能額外增加2位元的解析度,並能輕易用在晶片內部的解析度提升功能。此外,解析度的提升還能讓精準度進一步提高到28位元。
總結
馬達控制系統對於更高精準度、更高速度、以及微型化的要求持續攀升。業界運用光學編碼器作為馬達位置的感測元件,為此,在量測馬達位置時,光學編碼器的訊號鏈必須具備高精準度。高吞吐量的高速ADC能精準擷取資訊,然後將馬達位置資料饋送到控制器。AD7380的速度、密度及效能,可在位置回饋系統中達到更高的精準度與最佳化程度。
(本文作者:Jonathan Colao為ADI 應用工程師)